Connecting and Addressing
Demonstrates example of connecting and addressing.
Jog and Limit
Demonstrates example of jog and limit.
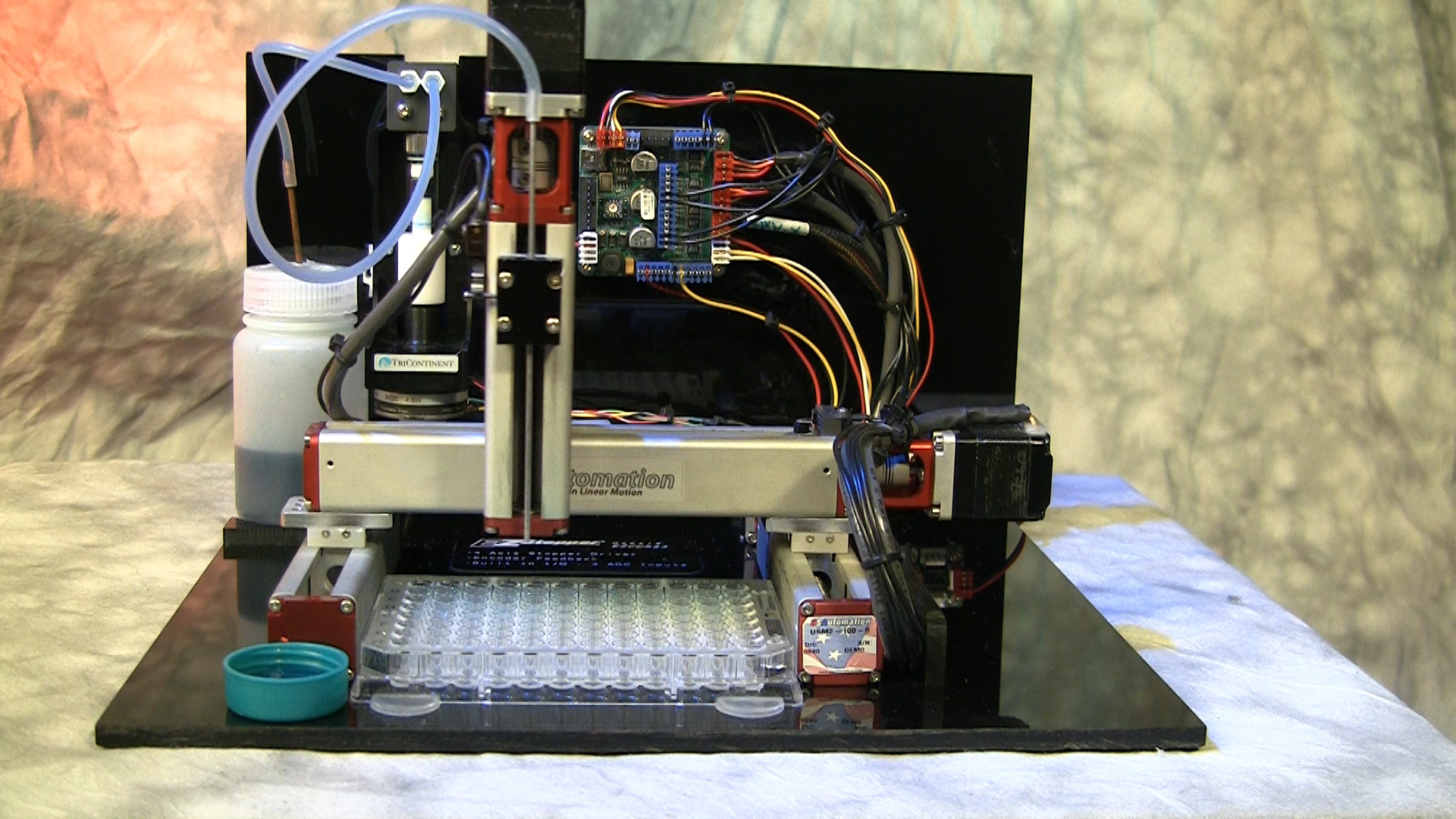
EZ4AXIS
Demonstrates example EZ4AXIS board controlling and driving a complete pipetting system.
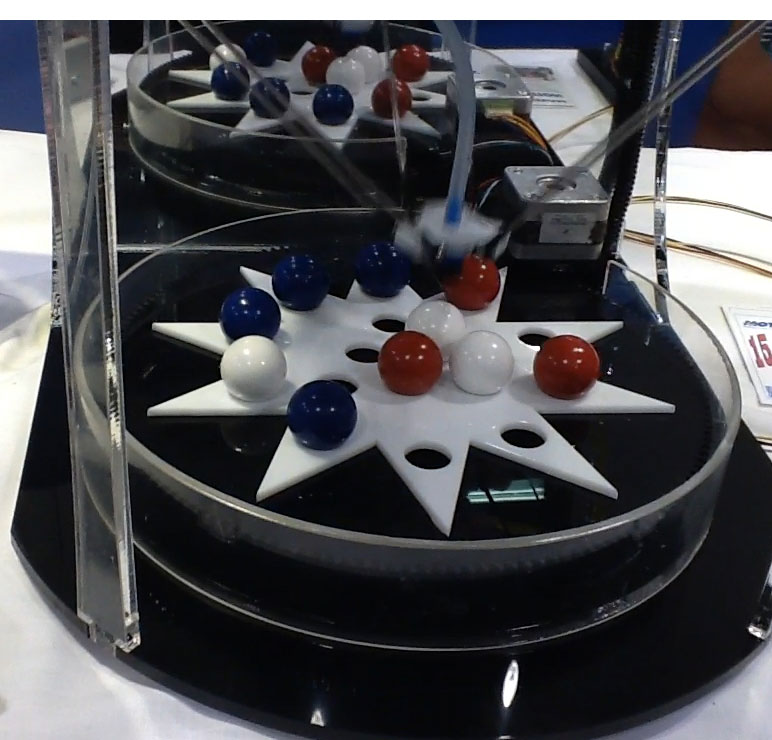
EZ4AXISXR
Demonstrates example EZ4AXISXR board controlling and driving a Delta Robot.
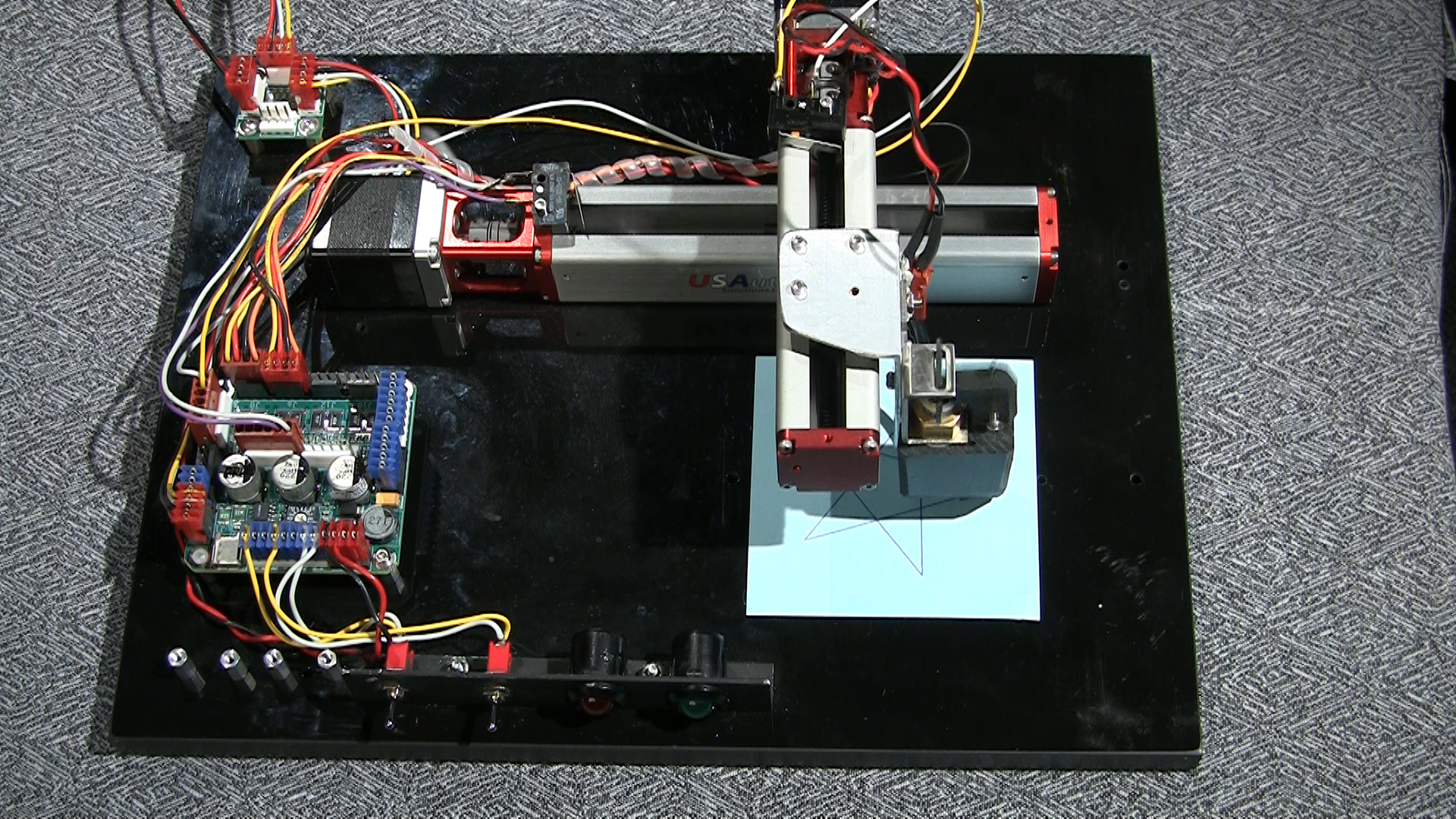
Demonstrates EZ4AXIS board controlling and driving a two axis pen plotter. Linear and Circular Interpolation are shown.
IMPASS
Demonstrates application of EZServos